Research at Oregon State University
In the summer of 2014 I worked in the Personal Robotics Laboratory at Oregon State University. Our lab worked on human-robot interaction regarding privacy expectations with mobile robots.
Some attributions are listed under my previous name, Penn Biggs.
Privacy Expectations
Our objective was to test if users felt their privacy needs were upheld when using a mobile robot streaming video data. We also tested the impact of the privacy systems on their performance. We developed a system in ROS that applied different filters to “private” video data, and created a user study to test if these filters impacted their tasks.
Map Registration
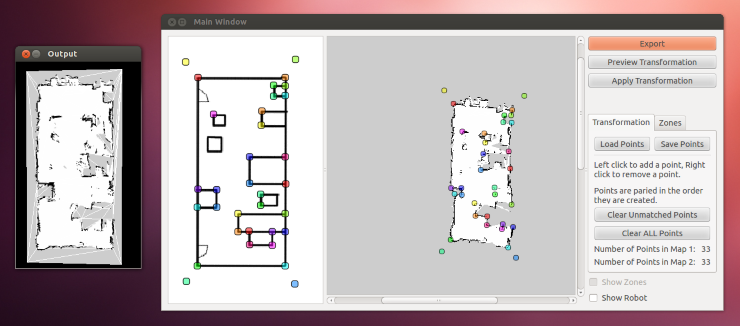
Robots can use maps they generate to navigate physical spaces. These maps, called SLAM maps, are not a clean representation of the physical space. We wanted to give the user a cleaner and easier-to-read map, and provide a correspondence between the two maps.
I built the map registration tool to create this correspondence. It can be found on github under the “map_registration” directory. The tool works by transforming the polygons between corresponding points. A more detailed explanation can be found on the wiki.
A paper based on this tool, “A Method for Establishing Correspondences between Hand-Drawn and Sensor-Generated Maps”, was published in 2016. User’s performance in locating objects in a room was measured using the two different maps. No statistical difference was found between the two maps.